Inclusive design that improves independence of the disabled people with an AI-based feeding robot
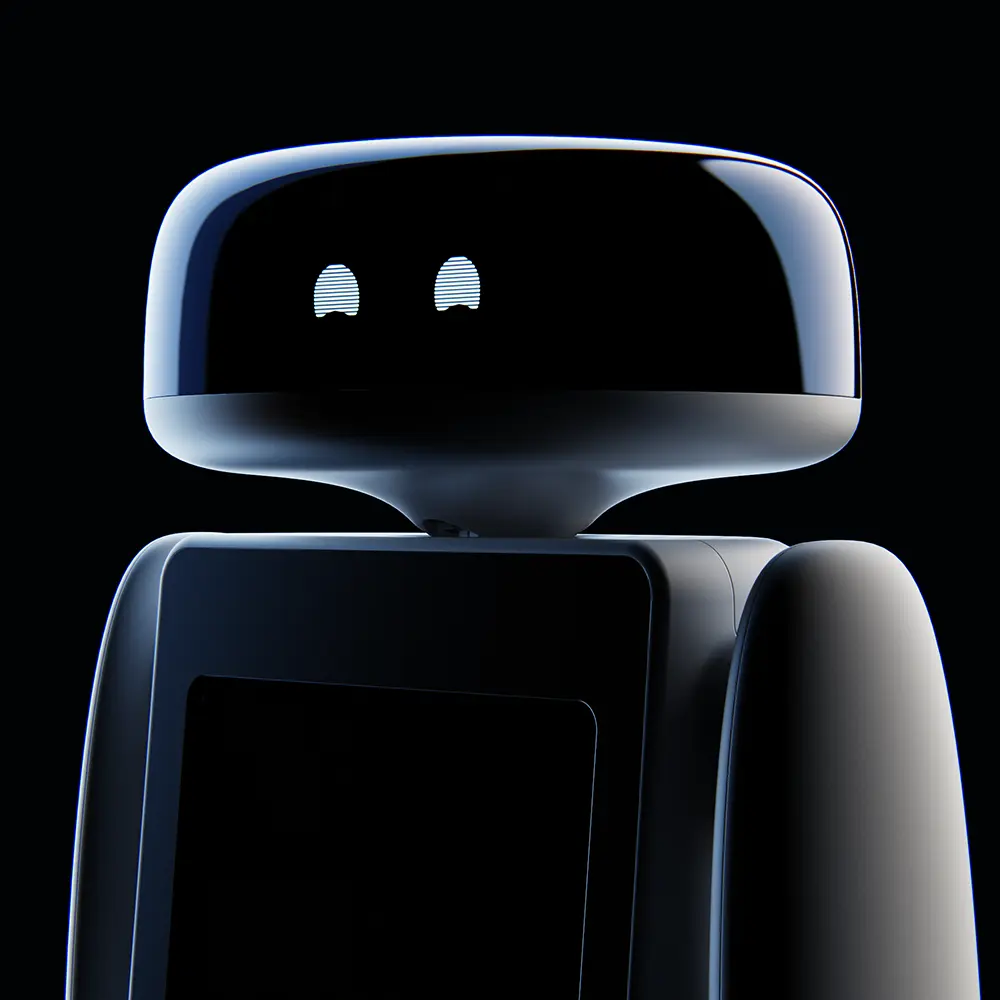
FIDI is a robotic arm equipped with a camera and interchangeable cutlery, mounted on a base on which a plate of food is placed. The device serves the meal to the person seated at the table, adapting to their position and pace of eating thanks to the use of a 3D camera and advanced artificial intelligence algorithms.
1. The FIDI project aims to increase the independence of people with disabilities, enabling them to be more independent when eating. Thanks to the robotic arm, the feeding process becomes convenient and comfortable, eliminating the need for the constant presence of a carer. FIDI adapts to the individual user’s needs, adjusting the pace and responding to the fed person’s signals, improving the quality of care. In addition, it relieves the caregiver’s burden, easing daily chores and improving time management.
Process
1. The first stage of the design process was to digitise and define the full ranges of movement of the motors, which created a solid base for further design work. We then determined the mounting points and planned the cable routing.
2. Ergonomics played a key role in the FIDI project. One of the main challenges was to design a plate that would provide the correct range of movement for the robotic arm and allow food to be scooped onto the spoon efficiently. An important aspect was also to adapt the dimensions and height of the device to the individual needs of the future users of the feeding robot.
3. When designing the style line, we had to consider aspects such as ease of cleaning and portability. The design project was based on an iterative process, where 3D printed prototypes allowed for quick verification and ongoing adjustments.
Results
1. The robot has been brought to market, enabling FIDI to enable people with disabilities to be more independent when eating. This in turn promotes their independence and sense of control over their own lives.